
Rocrail – rozjíždíme kolejiště přes počítač (2)
![]() Minule jsem vytvořil plán kolejiště, nastavil senzory a nastavil výhybky. Dneska to dotáhnu až k puštění vlaků v automatickém provozu alespoň v základní variantě.
Minule jsem vytvořil plán kolejiště, nastavil senzory a nastavil výhybky. Dneska to dotáhnu až k puštění vlaků v automatickém provozu alespoň v základní variantě.
Opět opakuju, že článek slouží spíš pro získání základní orientace. Neslouží jako návod krok za krokem, ani neslouží jako výchozí bod pro poskytování jakékoliv podpory. Kdo potřebuje výklad podrobněji, ten bude muset zapnout mozkové závity nebo manuál. Kdo potřebuje trošku postrčit nebo nasměrovat a rád si vše vyzkouší sám, pro toho je tento popis ideální.
Pokud je plánek kompletní, nyní lze vytvořit první lokomotivy. Software umožňuje vytvořit lokomotivy, nebo celé vlaky. Já si vystačím, v případě pevných souprav, pouze s nastavením lokomotiv jako celého vlaku.

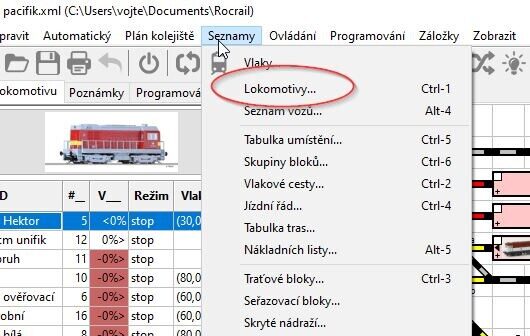
Takže “NOVÝ” a vytvářet. Unikátní ID pro mě třeba číslo lokomotivy nebo řada + nějaký popis, např. 742 30cm unifik. V Obrázku lze vybrat PNG z disku, zobrazující model nebo fotku lokomotivy – určitě doporučuju pro snadnější orientaci. Délku nastavuju podle délky soupravy podle skutečnosti (v cm odhadem), protože v automatickém provozu je pak nastavené, že vlak může jezdit jen na kolej, která je delší než on sám.

Nejnutnější je nastavit adresu lokomotivy, opět v poli Adresa.

Tabulka rychlostí bude pro automatický provoz potřeba, zatím není potřeba nic měnit. Rychlosti pro automatický provoz jdou nastavovat asi na 3 místech + v dekodéru, takže je v tom trochu zmatek. Takže pro začátek nechat tak, a pak se sem vrátit. Osvědčilo se mi toto nastavení, kdy střední rychlost není 50, ale 80 %. Protože automatický provoz využívá často právě Vmid, tak výchozích 50 % způsobovalo, že vlaky se ploužily velmi pomalu, pokud byly na dekodéru přiškrcené do pomala.

Seznam mých vytvořených lokomotiv podle ID, adresy a obrázku. Všimněte si, že kromě prvního Hektora mají všechny nastavený směr “vpřed” (šipka vpravo). To bude potřeba později.

Pokud chcete zobrazit obrázek lokomotivy přítomné v bloku, zaškrtává se ve Vlastnostech Rocview pole Obrázek lokomotivy. To jen trochu mimo téma a je to funkce jen pro automatický provoz.

Poklikem na řádek lokomotivy se otevře ovládací okno, kde je teď vhodné vyzkoušet ovládání přes počítač buďto posuvníkem ručně, nebo stiskem jednoho ze čtyř skoro-římských tlačítek přednastavené rychlosti (viz okno výše reprezentujíc rychlosti nejnižší, střední, “běžnou jezdící” (cruising) a maximální”). Ronvěž odsud jde ovládat funkce (směrová světla jsou zapnutá – červený puntík), směr, nebo zastavit samotnou lokomotivu ihned příkazem “Stop” (vysoké tlačítko vpravo) nebo vypnout všechen provoz (velké tlačítko “Stop” ve spodním řádku).

Tak, teď jsou vytvořené plány, lokomotivy – a co dál? Pokud má být ovládání počítačem čistě ruční záležitost, pak je hotovo. Výhybky ovládat po jedné, lokomotivy ovládat ručně nebo na myší.
Pokud má být počítač využitý trochu víc, a to na automatický provoz, pak je potřeba pokračovat v nastavování.
Nejprve je potřeba si nastavit vlakové cesty. To jde dělat ručně po jedné v menu Vlakové cesty, ale to je pro víc jak 4 kombinace dost otrava.

Proto existuje tlačítko Router – Směrování, které vygeneruje cesty mezi všemi bloky.

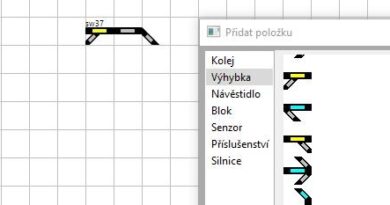
Pozor na to, že vyváří všechny možné kombinace z bloku – do bloku, v mém případě tedy umožňuje vygenerovat i cestu z Vraného do Vraného přes skryťák pomocí kolejí, kde nejsou bloky. Pro mou situaci jsem tedy před vytvořením cest odmazal 2 koleje viz kroužky, kde jsem přerušil možnou cestu z Vraného do Vraného mimo existující skryté bloky, a po vytvoření cest jsem je vrátil zpět.

Výsledný počet cest je 50. Seznam tras nyní využívá názvy bloků, takže je potřeba na začátku dobře rozmyslet jejich název pro lepší orientaci. Tady vidím, že VnV2 (Vrané 2. kolej) do Mech (Měchenice) je jasná trasa. U bloků se vždy zobrazuje malé “+” pro identifikaci strany. To se pak propisuje do toho, že trasa vede z bloku VnV2+ (odjezd Vrané plus) do Mech+ (vjezd Měchenice plus). Tím lze i v okruhu identifikovat trasu správným směrem, protože pro okruh mám vždy dvě trasy mezi VnV a SN se stejnými čísly, jen jsou prohozené vstupný a výstupní strany bloku.

Generátor rovnou vygeneruje příkazy pro všechny výhybky ve vlakové cestě, které při každé aktivaci cesty přestaví (i když jsou ve správném směru, vždy pro jistotu vyšle příkaz pro jejích přehození).

U každé trasy jde povolit nebo zamítnout výslovně lokomotivy, které smí / nesmí trasu využívat, dále jen určité typy vlaků nebo volbu “Pendlující vlak”. Pokud je ve volbě lokomotivy možnost “Pendlující vlak” zapnutá a v trase je zvoleno “Jen”, smí trasu využívat jen dané lokomotivy. Toto využívám do Měchenic, kde není možnost automatického objíždění a je tedy potřeba tam posílat jen vratné soupravy (solo motoráky nebo vlaky s řídicím vozem na konci soupravy). Jiný vlak to tam samo nepošle. Jde tu vymezit i jen kategorie vlaků (nákladní) nebo délka (max 60 cm).

Tak, tím je to základní v trasách hotové. Pokud není potřeba někde nastavovat výjimky, je to celkem bez práce. Teď ještě nastavení Rocrail serveru – ve volbě Rocrail vlastnosti.

V kartě Automatický režim jsem potřeboval upravit 2 pole – jednak “Min blok – délka vlaku” jsem si nastavil na 0. Toto je rezerva pro délku vlaku do bloku. Pokud je zde nastaveno 20, automat nepustí vlak dlouhý 70 cm do bloku kratšího než 90 cm (20 cm je rezerva). Nastavil jsem si nulu, tedy vlak 70 cm dlouhý mi může jet na kolej, kde jsem si nastavil 70 cm délku bloku.
Dále jsem tu nastavil “Čas přepnutí vlakové cesty” na 500 (v milisekundách). Výchozí nastavení mi občas vynechávalo přestavování výhybek, protože software posílal příkazy na přehození výhybek rychleji po sobě, než zvládla obyčejná Roco kostka zpracovávat. Takto se mi to osvědčilo v pohodě.

Tak, teď je možné myší přetáhnout lokomotivy do bloků, kde se právě nachází, a zkontrolovat jejich směr.

Pokud má lokomotiva určený směr (má za sebou vagony a musí jet vpřed), je vhodné zapnout si ovladač na počítači a vyzkoušet, jestli při šipce “doprava” jede lokomotiva směrem vpřed, nebo jestli tlačí vozy.

Pokud tlačí vozy, tak pravým tlačítkem na lokomotivu a “Změnit logický směr” nebo v jiné verzi jako “Prohodit umístění”. Tím se změní šipka, bude doprava, ale bude s mínusem (viz sloupec v seznamu lokomotiv).

Tak, teď je vidět u lokomotivy šipka, kam podle počítače směřuje předek vlaku. Pokud to není pravda a lokomotiva směruje doleva, je potřeba zvolit Prohodit vstupní stranu bloku.

Teď by měl Kocour směřovat na pravou stranu a Zamračená na levou, i při pohledu na kolejiště.

Teď přichází nejzdlouhavější část a to je konfigurace automatického zastavování vlaků v blocích. Pravým na blok – Vlastnosti.

V kartě Hlavní si nastavuju rozhodně Délku – to je délka, která se páruje s délkou vlaku a musí tu být větší než délka vlaku, který se sem vejde. “Povolit změnu směru” používám, pokud se v daném bloku může obracet vratná souprava (motorák na Měchenice).

Opět je tu karta Práv. Pro blok SN5 mi do něj nesmí 854 004 Hydra, ale Pendlující vlaky do něj smí. Pokud nastavím “Pendlující vlaky” na “Jen”, může do bloku jen vratná souprava nastavená ve vlastnostech lokomotivy jako Pendlující vlak. Celé to zde jde filtrovat z důvodu, že např. mi zde vykolejuje Hydra, tak jí sem nepustím.

Nejdůležitější práce, a celý kámen úrazu, je v tom, že jde potřeba nastavit zastavovací mechanismus v bloku – tedy vlak vjede do bloku a co dál? Jak bude vědět, kdy zastavit, aby třeba nepřejel do zhlaví?! Tady je ta nevýhoda jednoho senzoru – vlak to neví. Jde jen nasimulovat akce, že “po vjetí do bloku zastav za 3,9 sekundy”.
Pro tyto úkony je tu nastaveno – při vjezdu do bloku SN5, který využívá senzor fb-15, ze všech směrů do bloku ze strany “mínus” (viz výše), dojde k aktivaci Časovače událostí (T2) za 3900 ms (milisekund, tedy 3,9 sekund). Jde nastavit, že pro “all enter +” nebude zaškrnuto “T2”, pak se použije Časovač událostí 1 v hodnotě “0”. A pro “all enter -” bude zaškrtnuto “T2” a použije se “Časovač události 2” v hodnotě “3900”. Toto se hodí pro nástupiště umístěná nesymetricky mimo střed koleje. Vlaky přijíždějící ze strany “+” dojde po vjetí do bloku ihned k zastavení za čas 0 s. Pro vlaky vjíždějící ze strany “-” dojde k zastavení za 3,9 s. Pozor, že dlouhý motorák při vjezdu prvním podvozkem sice vjede, ale přes desku plošného spoje dojde k přemostění senzoru a senzor se stále tváří jako neaktivovaný. Vlak tedy obsadí senzor až v momentu, kdy jsou všechna 4 kola obou podvozků lokomotivy / motoráku ve sledovaném úseku. A to je ten zásadní problém, proč není ideální mít jeden senzor na celou kolej v podobě sledování obsazenosti. Jednak dojde k aktivaci pozdě, a jednak nejde vždy synchronizovat čas zastavení. Např. Vectron, pokud bude mít nastavenou teoretickou rychlost 150 km/h, přejede blok a vjede do následujícího zhlaví (způsobí zkrat na nepřehozené výhybce před ním), zatímco pomalá 810tka s nastavenou rychlostí 80 km/h zastaví uprostřed bloku, protože oba jsou v bloku 3,9 s a poté dostanou příkaz k zastavení.
Pro tento problém jsem se snažil nastavit rychlosti všech vlaků přímo v dekodéru na co nejstejnější rychlost. Pro lokálku mého typu to není problém, simuluje to maximální povolenou traťovou rychlost např. 60 km/h, které dosáhnou všechna vozidla stejně. Dále si jde hrát s nastavením zrychlování a zpomalování v dekodéru (CV3 a C

Teď přichází dlouhá testovací fáze – vjet do bloku a počkat, co se stane. Pokud zastaví všechny lokomotivy na podobném místě, nepřejely blok ani nenechaly zbytek vlaku na vjezdovém zhlavím, je nastavená hodnota časovače ideální. Pokud je kolej určená jen pro motoráky 810, už toto bylo v Právech jmenováno dříve a pak jde ladit čas jen pro 810tky.
Nyní se kroky prolínají mezi ostrým provozem a testováním, ale automatický režim se spustí dvěma ikonami nahoře (On-Off a Automatický režím). Stále všechny lokomotivy stojí, a poklikem na každou lokomotivu v bloku se lokomotiva spustí. Pokud je vše nastavené dobře, lokomotiva si rezervuje následující volný blok, který vyhovuje jejím pravidlům (délka, práva atd.) a přestaví si výhybky. Pokud se povede přestavit výhybky, cesty se zamknou a jsou zvýrazněné žlutě. Tady by se samozřejmě hodilo sledování polohy výhybky, což jsou dodatečné senzory, kterými by si počítač ověřil stav výhybek. Takto se spoléhá, že příkaz byl vyslán a výhybka přestavena, ale pokud by došlo k přeslechu, počítač to nezjistí.
Vlak nyní odjede podle nastavené rychlosti (běžně Vmid nebo Vcru podle toho, jestli je aktivní volba “přes výhybky jen rychlostí střední Vmid”) a vjede do nového bloku, kde by měl zastavit podle Časovače událostí. Na mém kolejišti můžou jet 2-3 vlaky najednou, takže by se neměly nikde srazit, nikde by se neměly potkat a nikde by si neměly na zhlaví blokovat cestu navzájem.

Pokud vše bylo nastavené správně, vlaky se začnou střídat v náhodném pořadí a podle priorit ve vlastnostech lokomotiv případně upřednostňované vlaky nejprve, nebo si budou vybírat přednostně nejkratší vhodné bloky přednostně. Budou zastavovat tak, aby vozy stály u nástupiště a ne v trávě atd. Problém samozřejmě bude, pokud se střídají různě dlouhé soupravy. Pokud budou jezdit soupravy podobně dlouhé, není to problém. Pokud budou jezdit soupravy krátké, můžou zastavovat všechny lokomotivou u středu nástupiště. Ale nemůže dlouhý vlak nastavit u středu nástupiště a vagony nechat na zhlaví. Nebo můžou, ale časovač je jen jeden. Můžou krátké soupravy mít nižší rychlost a tím zastaví za stejný čas uprostřed nástupiště, zatímco delší soupravy rychleji jedoucí zastaví za stejný čas ve vzdálenější části nástupiště. Kombinací teď bude spousta a teprve začíná svět objevování toho, co ten software vlastně umí. I tomu bude potřeba přizpůsobit provozované soupravy.

Nyní lze nastavovat spousta dalších věcí, voleb, parametrů, kooperace s návěstidly atd. O tom třeba zase někdy příště. Je zde spousta kompromisů, není to univerzální návod a ani počítač nezná všechny naše přání a myšlenky. Nejde od toho v tomto stavu čekat zázraky a je potřeba to trochu přiohnout potřebám kolejiště. Ale pokud jste dokázali rozchodit automatický režim až sem, už ohromíte návštěvnické publikum tím, že vlaky jezdí, střídají se, zastavují, výhybky se přestavují atd. Teď je čas otevřít si pivo (nebo víno, nebo čaj) a jen sledovat, jak to všechno jezdí samo dokola, nebo pendluje do koncového nádraží.


Tak to už je mimo oblast mého chápání. Asi už zemřu u svého analogu.
Dobrý den. Velice se omlouvám, že vás zdržuji, ale po přečtení vašeho úvodu do programu Roc-Rail a následující pasáže “Pozor, že dlouhý motorák při vjezdu prvním podvozkem sice vjede, ale přes desku plošného spoje dojde k přemostění senzoru a senzor se stále tváří jako neaktivovaný. Vlak tedy obsadí senzor až v momentu, kdy jsou všechna 4 kola obou podvozků lokomotivy / motoráku ve sledovaném úseku”
jsem se zděsil. Jsem ve fázi pokládky kolejí a moje idea je taková, že chci jezdit “ručně”
a pomocí programu “jen” přehazovat výhybky a stavět návěstidla. Problém je, že nevím, co všechno se dá v programu nastavovat a jaké se dají vytvářet závislosti. Chci, aby vlak po průjezdu kolem návěstidla ho automaticky “shodil” na stůj. Vytvořil jsem si tedy představu, že za každým návěstidlem vytvořím krátký (cca 10cm) izolovaný úsek (jakousi spínací kolej) ,který připojím přes modul zpětného hlášení S88. Podle vašeho popisu, když tedy vjede delší lokomotiva, nebo dlouhý motorový vůz jedním podvozkem na ten 10cm úsek, tak nedojde k vybavení obsazení ?? Délka toho izolovaného úseku musí být delší, než nejdelší vozidlo ? Prosím o bližší info, protože bez toho nemohu vůbec pokračovat v práci…. 🙁
Děkuji.
Je to bohužel víceméně tak, taky jsem si to představoval původně “jinak” než to dopadlo. Plánuju na toto téma nějaký článek, protože to je poměrně zásadní věc při plánování. Doporučuju to vyzkoušet, on při vjezdu jakoby “problikne” a třeba by to stačilo pro vyvolání nějaké akce, nebo jde v nastavení nastavit délku pulzu, po které to vyvolá akci, a ten zkrátit. I tak by existovalo určitě nějaké dodatečné řešení – např. mezi kolej a S88 ještě vsadit nějaké optočidlo, které by mělo polohu “prázdné/obsazené” bez ohledu na vůz, byť to bude práce navíc.
Já používám také jeden senzor, ale na zastavování vlaků jsem použil funkci BBT (https://wiki.rocrail.net/doku.php?id=bbt-generate-in-en). Díky tomu mám možnost nastavit zastavení pro každý vlak, rychlost a blok zvlášť. Funguje bez problémů.
Až teď jsem ale narazil na problém s 810kou, která z nějakého důvodu, i s vypnutými křivkami, při ovládání z počítače, nezastaví okamžitě (při ovládání ovladačem se to neděje). To v kombinaci s pozdní detekcí způsobilo zastavování až na druhém zhlaví. Přes různé pokusy se BBT pro 810ku nepodařilo rozchodit. Proto jsem její zastavování vyřešil nastavením enter2shortin.